Getting Started
Installation
ContextCapture mobile can be downloaded from the Apple's App Store.
It is recommended to use an iPhone or iPad with iOS 10.3 or higher.
Internet connectivity is required to use some of the features of the product and installation of the application.
Useful Concepts
An advanced use of ContextCapture requires to know a few concepts of photogrammetry and geodesy.
The interior orientation - or intrinsic parameters - of a camera refers to some internal properties of the camera: the size of the camera sensor, the focal length of the lens, the position of the principal point in the image plane, and the distortion of the lens.
We call photogroup a set of photographs with identical interior orientation. In the sequel, photogroup properties will refer to the interior orientation shared by all photos of a photogroup.
In practice, interior orientation is unique to one physical camera with all its settings fixed. Even for two cameras of the same model with same settings, their respective photographs do not constitute a single photogroup.
The exterior orientation - or pose - of a camera refers to the 3D position of the optical center of the camera and the 3D rotation of the coordinate system of the sensor in the world coordinate system.
To perform 3D reconstruction from photographs, ContextCapture must know very accurately the photogroup properties of each input photogroup and the pose of each input photograph. If you ignore these properties, or if you do not know them with sufficient accuracy, ContextCapture can automatically estimate them through a process called aerotriangulation - or aerial triangulation - sometimes abbreviated to AT.
One important step of aerotriangulation is to determine pixels in two or more different photographs which correspond to the projections of a same physical point in the scene:
-
If the 3D position of the physical point is not known a priori, the photo correspondences form a tie point. ContextCapture can automatically generate a large number of tie points.
-
If the 3D position of the physical point is prescribed, the photo correspondences and the 3D position form a control point. When control points are present, the result of aerotriangulation can be accurately georeferenced. Whereas tie point generation is fully automated in ContextCapture , control points require some manual intervention to enter their 3D coordinates and their accurate projections in photographs.
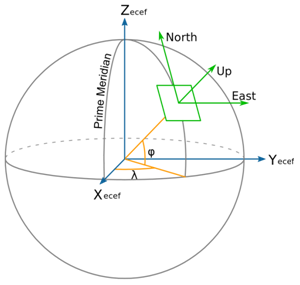
When poses of photographs are georeferenced, ContextCapture uses the Earth Centered Earth Fixed (ECEF) spatial referential system. ECEF is a standard global Cartesian coordinate system. Please refer to http://en.wikipedia.org/wiki/ECEF for a complete definition.
Whereas ContextCapture uses ECEF for photo poses, it uses a local East North Up (ENU) spatial coordinate system for the 3D reconstruction process. ENU is a Cartesian coordinate system with a local origin, oriented along the WGS84 ellipsoid, with axes pointing to East (X), North (Y) and Up (Z) directions. ENU allows a more convenient manipulation of 3D models than ECEF, because its Z axis coincides with the up vector. However, please note that 3D models produced by ContextCapture can later be reprojected to any coordinate system.
In other circumstances, ContextCapture describes georeferenced positions using two geographic (longitude, latitude) or two projected (X, Y) coordinates, complemented with ellipsoidal height, which is the height above the reference ellipsoid (usually WGS84, but it may be a different ellipsoid, example, GRS80, for some spatial reference systems). Ellipsoid height differs from orthometric height, which is closer to the popular height above sea level. ContextCapture uses ellipsoidal height instead of orthometric height, because the former has a simple and unambiguous mathematical definition, whereas the latter is based on a geoid height grid subject to sampling and accuracy issues.